 Tweet
Tweet
Hei, ny ramme landet pĺ byggebordet etter noen korte dager i posten helt fra Canada. Rammen kommer ferdig satt sammen og kommer tilsendt i en boblekonvelutt rett hjem i postkassa pĺ kort tid...genialt.

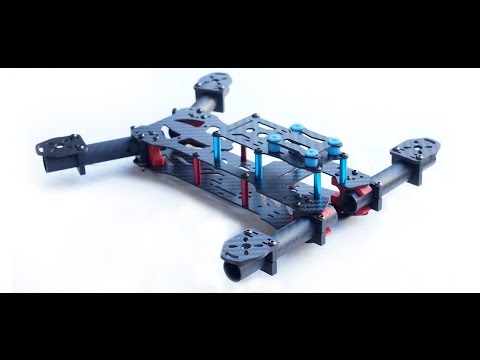
Litt om ramma, den er laget i karbon selvfřlgelig men har noen smarte trekk som gjřr at den skiller seg litt ut fra resten av gjengen med rammer. Den er i fřrste omgang laget for ĺ kunne klappes sammen for ĺ lett kunne transporteres.

Armene er i super beefy 16MM karbonrřr som jeg vil tro aldri kommer til ĺ knekke, og fordelen med dette er at man faktisk kan plassere ESC'ene inni armen om man har ESC'r som er smĺ nok. Har man ikke det er det forřvrig "masse" plass inne i kroppen til de der ogsĺ. Mine RotorGeeks 12a var desverre litt for breie for ĺ kunne plasseres inne i rřrene..

En annen ting med denne ramma er det at man kan, takket vćre multiple plasseringer av rřrfestene, ha tre forskjellige konfigurasjoner av armene ettersom man řnsker det selv.

I tillegg til alt dette kan man skyve motorfestene ut og inn for ĺ tilpasse ramma etter hvor store propeller man řnsker ĺ kjřre. Og ikke nok med det, men det er og mulig ĺ fritt sette vinkelen pĺ motorene om man řnsker seg en skikkelig rĺtass pĺ racefeltet. Mange fordeler med denne ramma altsĺ.
Startet fřrst med ĺ skru nesten hele rammen fra hverandre for sĺ ĺ montere kamera fřrst. KAmeraet er et som egener seg veldig godt til flyging hvor det er viktig med lite forsinkelse pĺ bildet. Kameraet er handlet her:
DC5V Plastic Case mini Sony Super HAD CCD 600TVL Camera 2.8mm Lens for FPV

Det neste var ĺ gjřre klart for PDB(power distrubution board) montering. Her skal all elektronikk innom for ĺ hente strřm fra lipo.

Nĺr sĺ motorer var montert pĺ armene og ramma var det bare ĺ lodde pĺ ESC'ene og fĺ loddet alt sammen mot PDB.

Sĺ ble fokuset rettet mot flight controllern, eller Naze32 kortet. Dette ble klargjort ved ĺ lodde pĺ de pinner og ledninger som dette trenger for ĺ gjřre den funksjonen den kan best.

Denne fikk sĺ et par koblinger opp mot PDB for ĺ mĺle spenningen pĺ batteriet sĺn at den kan pipe nĺr batteriet begynner ĺ bli tomt.

Resultatet da er at man har en salig ledningsspaghetti som man febrilsk prřver ĺ gjemme unna med ĺ sette pĺ topp-plata. til venstre i bildet under.
Siden mesteparten nĺ er loddet og koblet til gjenstĺr det bare egentlig ĺ skru platene sammen og justere litt vinkler pĺ motorene fřr det er klart for maiden.

Satt sammen en liten "unboxing" video ogsĺ, letter ĺ vise ting pĺ video.. monteringsvidoen kommer og straks...enjoy
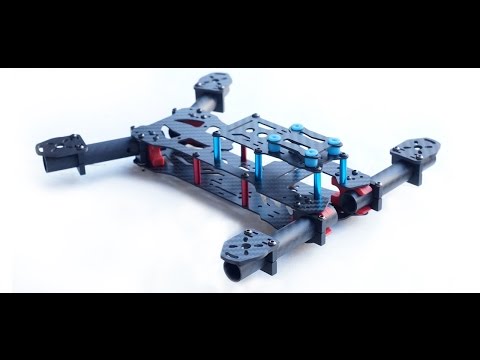
Litt om ramma, den er laget i karbon selvfřlgelig men har noen smarte trekk som gjřr at den skiller seg litt ut fra resten av gjengen med rammer. Den er i fřrste omgang laget for ĺ kunne klappes sammen for ĺ lett kunne transporteres.
Armene er i super beefy 16MM karbonrřr som jeg vil tro aldri kommer til ĺ knekke, og fordelen med dette er at man faktisk kan plassere ESC'ene inni armen om man har ESC'r som er smĺ nok. Har man ikke det er det forřvrig "masse" plass inne i kroppen til de der ogsĺ. Mine RotorGeeks 12a var desverre litt for breie for ĺ kunne plasseres inne i rřrene..
En annen ting med denne ramma er det at man kan, takket vćre multiple plasseringer av rřrfestene, ha tre forskjellige konfigurasjoner av armene ettersom man řnsker det selv.
I tillegg til alt dette kan man skyve motorfestene ut og inn for ĺ tilpasse ramma etter hvor store propeller man řnsker ĺ kjřre. Og ikke nok med det, men det er og mulig ĺ fritt sette vinkelen pĺ motorene om man řnsker seg en skikkelig rĺtass pĺ racefeltet. Mange fordeler med denne ramma altsĺ.
Startet fřrst med ĺ skru nesten hele rammen fra hverandre for sĺ ĺ montere kamera fřrst. KAmeraet er et som egener seg veldig godt til flyging hvor det er viktig med lite forsinkelse pĺ bildet. Kameraet er handlet her:
DC5V Plastic Case mini Sony Super HAD CCD 600TVL Camera 2.8mm Lens for FPV
Det neste var ĺ gjřre klart for PDB(power distrubution board) montering. Her skal all elektronikk innom for ĺ hente strřm fra lipo.
Nĺr sĺ motorer var montert pĺ armene og ramma var det bare ĺ lodde pĺ ESC'ene og fĺ loddet alt sammen mot PDB.
Sĺ ble fokuset rettet mot flight controllern, eller Naze32 kortet. Dette ble klargjort ved ĺ lodde pĺ de pinner og ledninger som dette trenger for ĺ gjřre den funksjonen den kan best.
Denne fikk sĺ et par koblinger opp mot PDB for ĺ mĺle spenningen pĺ batteriet sĺn at den kan pipe nĺr batteriet begynner ĺ bli tomt.
Resultatet da er at man har en salig ledningsspaghetti som man febrilsk prřver ĺ gjemme unna med ĺ sette pĺ topp-plata. til venstre i bildet under.
Siden mesteparten nĺ er loddet og koblet til gjenstĺr det bare egentlig ĺ skru platene sammen og justere litt vinkler pĺ motorene fřr det er klart for maiden.
Satt sammen en liten "unboxing" video ogsĺ, letter ĺ vise ting pĺ video.. monteringsvidoen kommer og straks...enjoy

Comment